language

Avec la fabrication flexible comme cœur, aide les usines du monde entier à réaliser l'Industrie 4.0
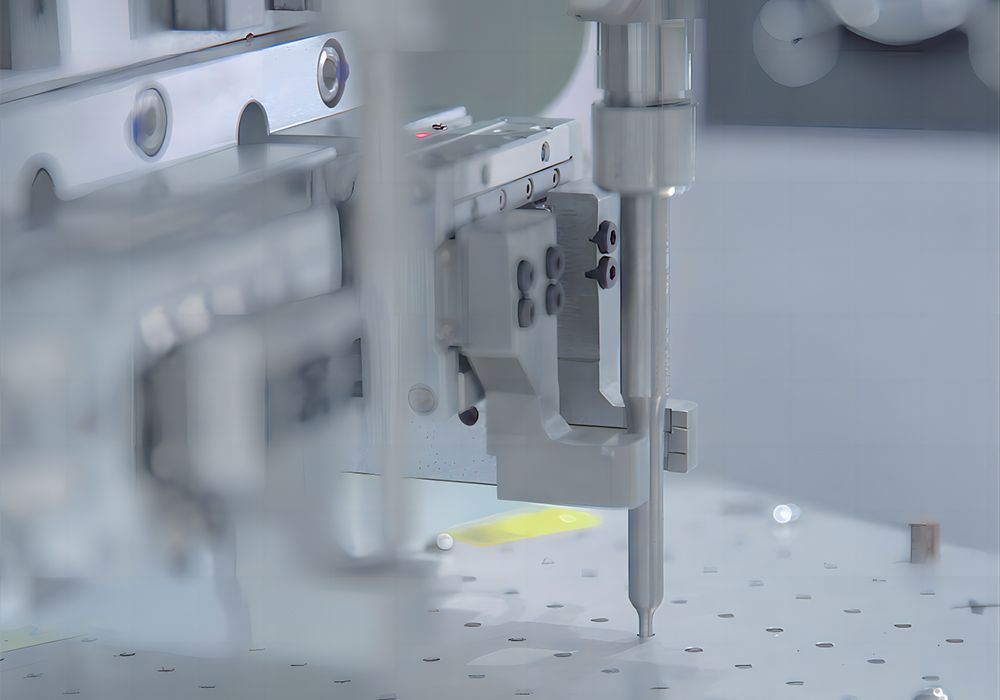
Machine de montage à vis de verrouillage

Machine de montage à vis de verrouillage




| Paramètres de base | |
| Spécification de vis | M0.6~M8 |
| Puissance | 900 W |
| Alimentation électrique | AC 220V |
| Répétabilité | ±0.02mm |
| Longueur du bras |
Axe X 100~700mm
Axe Y 100~300mm Axe Z 100mm |
|
Vitesse de déplacement |
Axe X/Y 1000 mm/s
Axe Z 500 mm/s |
| Optionnel | |
| Vision de localisation secondaire | 00 Non / 01 Oui |
| Vision en mouvement | 00 Non/01 Oui |
| Détection de hauteur flottante | 00 Non/01 Oui |
| Étalonnage automatique du couple | 00 Non / 01 Oui |
| Paramètres de base | |
| Spécification de vis | M0.6~M6 |
| Puissance | 1500 W |
| Alimentation électrique | AV220/10A |
| Longueur du bras |
Bras à 1 arbre 325mm
Bras à 2 arbres 265mm |
|
Répétabilité |
1~2 articulations: ±0.02mm
3 articulations: ±0.03mm |
| Optionnel | |
| Vision de localisation secondaire | 00 Non /01 Oui |
| Vision en mouvement | 00 Non /01 Oui |
| Détection de hauteur flottante | 00 Non /01 Oui |
| Étalonnage automatique du couple | 00 Non /01 Oui |


| 1.5~3s/pièce | EFFICACITÉ | 5s/pcs | |||
| 0~1/personnes | MAIN-D'OEUVRE | 2~3/personnes | |||
| Jusqu'à 99,95% | RENDEMENT | Cela varie d'une personne à l'autre | |||
|
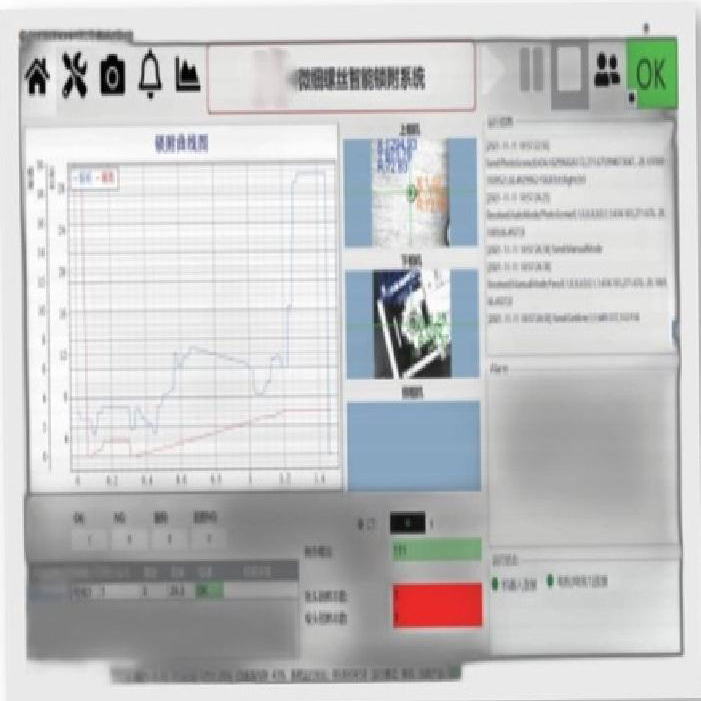
Surveillance en temps réel de l'ensemble du processus de paiement serré et alerte en cas d'anomalie
ALARME EN CAS D'ANOMALIE |
EXCEPTION
MANIPULATION |
La détection manuelle est incontrôlable | |||
|
Haute précision
Contrôle de couple de haute précision, surveillance des données en temps réel et ajustement |
COUPLE
CONTROLE |
Repose sur l'expérience des employés | |||
| Fonctionnement stable et presque aucun coût de gestion | COÛTS DE GESTION |
Rotation élevée
taux, qualité inégale du personnel et coût élevé de la gestion |
|||
|
Investissement ponctuel sans
investissement continu |
COÛT D'ENTRÉE |
Investissement continu
|
Industrie d'application
-
3C Électronique Pour les téléphones mobiles, les tablettes, les ordinateurs et autres produits électroniques grand public pour fournir des solutions de serrage automatique, d'assemblage automatique flexibles.

-
Stockage d'énergie Fournir une solution de serrage profond automatique pour petits équipements de stockage d'énergie.

-
Outil électrique Fournir solution de vissage intelligent automatique pour outils électriques.

-
Automobile Fournir des solutions de serrage intelligent pour pièces automobiles, pièces intérieures, électronique automobile, etc.






SAVEZ-VOUS
POURQUOI NOUS CHOISIR
QUELLE EST LA DIFFÉRENCE ENTRE LE SERRAGE INTELLIGENT ET LE ROBOT DE PAIEMENT?
-
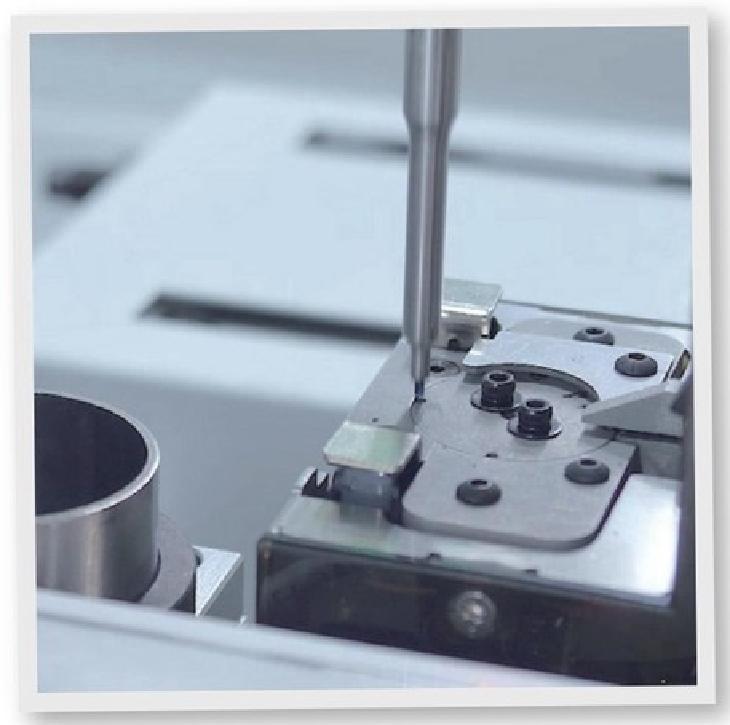
Exclusif pour les micro vis Spécialement conçu pour la recherche et le développement de micro-vis, le plus petit peut supporter une vis M0.6 serrée, à la recherche de plus de précision;
-
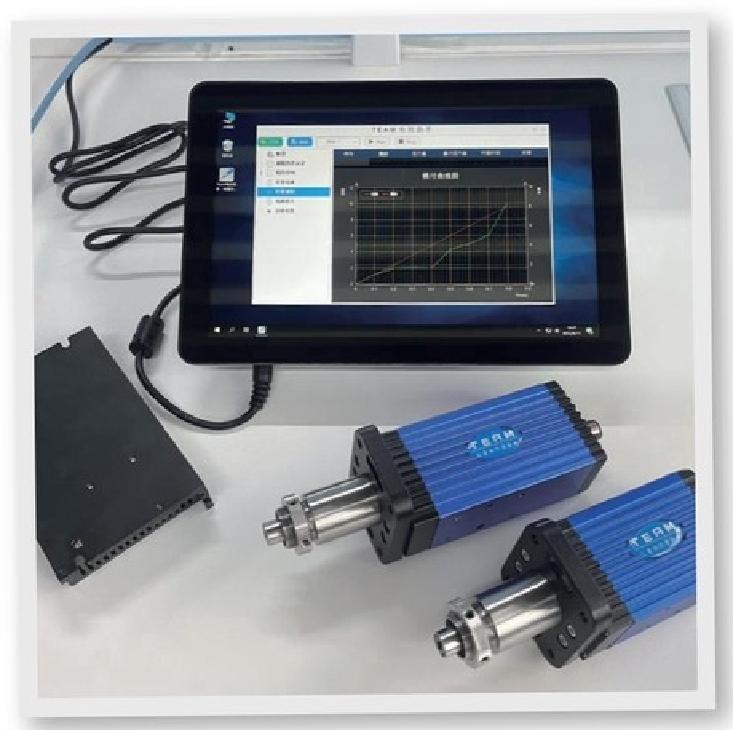
Processus de base contrôlable Développement indépendant des composants de base et des algorithmes de contrôle, précision de contrôle du couple jusqu'à 3 %, pour une plus grande professionnalisation;
-
Le rendement du paiement serré est plus élevé Logiciel de paiement serré propre, surveillance en temps réel du processus de paiement serré, plus de détection de glissement de dent tactique, de hauteur flottante, rendement jusqu'à 99,95 %, pour une plus grande stabilité;
-
Application de scénarios complexes Explorer le scénario de serrage réel et développer des produits adaptés à des scénarios spéciaux tels que l'interférence, le fraisage, le côté, etc.,

qui conviennent à des situations plus complexes ;


| DÉTECTION DU COUPLE, NOMBRE DE TOURS, | ||
| HAUTEUR FLOTTANTE, INCLINAISON ET GLISSEMENT | ||
|
Jugement du résultat OK | |
|
Réglage du couple : √
Réglage du nombre de tours : √ |
Par exemple, réglez la valeur de couple à 1 Nm et serrez le nombre de tours à 10.
Après l'exécution de la procédure de serrage, les données de surveillance en temps réel sont renvoyées. Lorsque la valeur de couple atteint 1 Nm et le nombre de tours atteint 10 tours, le logiciel juge que le résultat de serrage est OK et émet un signal OK. |
|

|
Jugement du résultat NG | |
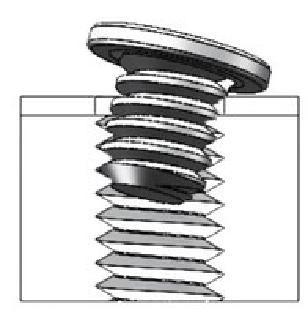
| 1. Détection de la hauteur flottante | ||
|
Par exemple, réglez la valeur de couple à 1 Nm et serrez
le nombre de tours à 10. Après l'exécution de la procédure de serrage, le les données de surveillance en temps réel montrent que la valeur de couple atteint 1Nm et le nombre de tours n'est que de 5. À ce moment-là, le le logiciel juge que le résultat de serrage est NG et la catégorie NG est flottante élevée, et émet un signal NG. |
||
|
Réglage du couple : √
Nombre de tours défini : × Résultat du jugement : hauteur flottante |
||
|
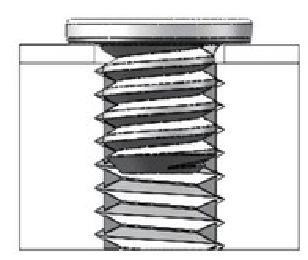
2. Détection de dent glissante | |
| Par exemple, réglez la valeur de couple à 1 Nm et serrez le nombre de tours à 10. | ||
|
Après l'exécution de la procédure de serrage, les données de surveillance en temps réel
retour montre que le nombre de tours a atteint 10, et la valeur de couple a été inférieure à 1Nm. À ce moment-là, le logiciel juge que le résultat de serrage est NG, et le la catégorie NG est au ralenti (filetage glissant), et émet un signal NG. |
||
|
Définir le couple : ×
Définir le nombre de tours : √ Résultat du jugement : Au ralenti (glissement) |
||






NOUS CONTACTER
Contactez-nous
Informations sur le produit
Quantité
Unité
Pièce
Prise en charge de la commande d'échantillons, personnalisation, vente en gros directe et paiement complet. Si le produit que vous recherchez n'a pas de contenu personnalisé correspondant, veuillez remplir le formulaire ci-dessous pour nous contacter, et nous vous répondrons dès que possible.